作物气候联合模拟系统预测技术的思考raybet雷竞技最新
在使用气候观测和GCM输出进行作物预测之间的中间步骤是使用气候再分析数raybet雷竞技最新据。再分析数据是经气候模式同化的气候数据的gcm输出。raybet雷竞技最新它们可以被视为在典型GCM分辨率下对天气的最准确描述,因此代表了大气环流的上限预测能力联合气候/影响建模系统(Chraybet雷竞技最新allinor et al. 2003)。Challinor等人(2005a)使用欧洲中期天气预报中心四十年的再分析作为印度GLAM作物模型运行的输入。该作物模型模拟了气候信号强的地区每月(ERA40)天气与产量之间的相关性。raybet雷竞技最新作物产量的偏差修正改善了网格单元的预测,其中亚季节性雨量分布ERA40的降水观测结果很好地吻合。然而,在ERA40没有捕捉到降雨的平均值或季节周期的地区,即使经过偏差校正,作物预测的技能也很差(Challinor et al. 2005a)。因此,气候模式对气候亚季节变率的良好预测,以及在作物模式中捕捉亚季节变率影响的能力,对于作物-气候联合建模系统进行raybet雷竞技最新熟练的预测都至关重要。
大多数作物模拟模型是确定的。也就是说,使用一组模型输入来派生一组输出。然而,季节尺度上的raybet雷竞技最新气候本质上是不可预测的。多模式天气集合的输出可以表示一些不可预测性,并提供概率输出(例如,DEMETER集合,Palmer et al. 2004)。对于作物模拟研究,Challinor等人(2005b)使用63个DEMETER集成成员的每个输出作为GLAM作物模型的输入来模拟印度西部花生的产量。离开-
-
 and 1981 (bottom) in Gujarat, India from the time of sowing of the groundnut crop")
- 图3.3。1975年(上)和1981年(下)印度古吉拉特邦花生播种时的降雨量次季节分布
 and 1981 (bottom) in Gujarat, India from the time of sowing of the groundnut crop")
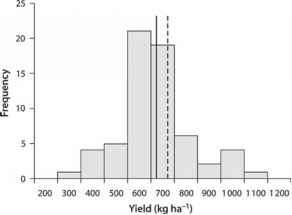
因此,作物模型模拟的是一年内作物产量的概率分布,而不是单一的平均值。以某一年为例,1998年印度古吉拉特邦的平均模型预测为713 kg hm -1。这接近于观测到的773 kg hm -1产量。然而,作物模型产量也提供了关于该平均值的概率分布,从中可以清楚地看出,在季节性作物预测中,非常好的产量和非常差的产量存在非零概率(图3.4)。概率后推在预测作物歉收(定义为产量阈值,例如400 kg hm -1, Challinor et al. 2005b)方面表现出良好的技能。Cantelaube和Terres(2005)利用WOFOST作物模型的DEMETER集合的产量对欧洲小麦产量进行了概率预测。他们得出结论,与目前的操作系统相比,使用DEMETER预报可以在季节早期获得可靠的产量预测。因此,农作物产量的概率预测似乎有很大的潜力。
气候-作物模型的综合方法raybet雷竞技最新
传统的作物模拟方法使用从气候模型输出到作物模型输入的单向信息流。raybet雷竞技最新然而,人们越来越认识到这一点
图3.4。利用DEMETER多模型集合对1998年印度古吉拉特邦花生作物的概率产量进行预测。实线和虚线分别为模型平均产量和观测产量
图3.4。利用DEMETER多模型集合对1998年印度古吉拉特邦花生作物的概率产量进行预测。实线和虚线分别为模型平均产量和观测产量
地表植被影响气候(例如,Cox et al. 1999;raybet雷竞技最新皮特曼等,1993;Osborne et al. 2004)。农作物约占陆地表面植被的12% (Ramankutty和Foley 1998)。他们可以通过修改自己的环境水循环表面温度。因此,用于气候变化影响评估的作物产量十年预测可能需要考虑作物和气候在这些较长时间尺度上的相互作用。raybet雷竞技最新这可以通过在共同的空间尺度上进行工作,并将作物和气候模型完全耦合,从而将生物和物理建模集成起来实现。raybet雷竞技最新
GLAM的作物生长和发育规律被纳入GCM的地表方案(Osborne et al. 2005)。在新的作物-气候模式中,作物根据raybet雷竞技最新气候模式的模拟环境(土壤和大气状态)生长,同时改变对确定地表能量平衡很重要的地表特征,如反照率和表面粗糙度(图3.5)。当与观测到的海面温度变化进行耦合时,耦合模型的作物生长季节和最终产量与观测结果吻合良好。然而,模式准确再现观测到的作物生产的能力与气候模式再现观测到的天气和气候模式的能力密切相关。raybet雷竞技最新
通过捕获种植区对气候的影响并直接使用GCM输出,将作物模型与GCM耦合可能潜在地降低作物模拟的不确定性。raybet雷竞技最新然而,很难精确地测试将作物模型耦合到GCM的效果,因为耦合的(在线的)模型和分离的(离线的)模型不容易以可比的方式运行。尽管如此,我们尝试了通过线上和线下作物模型对作物产量模拟进行初步比较。使用GLAM模拟了1979-1989年印度各地花生作物的产量(30个网格单元)。Challinor et al. 2004)和GLAM-MOSES(在线;Osborne et al. 2007)和产量与观测产量的比较。为此,在线和离线运行被设计得尽可能相似。然而,值得注意的是,两种不同方法在模型数据输入和模型设置方面仍然存在一些差异,因此没有改变(表3.1)。所以,我们的比较
-
. Blue and red arrows represent latent and sensible heat fluxes, respectively")
- 图3.5。Osborne等人(2007)作物-气候模型中大气状态、降水、土壤含水量、作物生长和地表通量同时耦合的示意图。raybet雷竞技最新蓝色和红色箭头分别表示潜热通量和感热通量
. Blue and red arrows represent latent and sensible heat fluxes, respectively")
离线GLAMa |
在线GLAM-MOSES9 |
|
天气数据 |
HTM和CRU数据 |
HadAM3 |
土壤数据 |
粮农组织datasetc |
HadAM3 |
PET和Td |
在GLAM内计算 |
由MOSESe计算 |
VPD和thf的时间步长 |
每天 |
日周期已解决 |
产量差参数9 |
不同的空间 |
0.5 |
越来越多的地区 |
从观察开始 |
源自crop maskh |
一般大面积作物模型(Challinor et al. 2004)。b印度热带气象和气候研究所。c联合国粮食及农业组织。d潜在的évapotranspiration和作物蒸腾作用。e Met Office Surface Exchange Scheme (Cox et al. 1999)。
作物生长的蒸汽压差和热时间。反映农业产量与潜在作物产量的比较情况。h参见奥斯本等。(2007)。
包括作物生长对大气的耦合效应和表3.1所示的差异。
与Challinor等人(2004)报告的较长时间序列后验结果一致,在线模型的后验结果相当好地模拟了观测的年际变化(图3.6a)。在线作物模型预测的平均产量比离线模型低(平均17%)。变化的
-

- 图3.6。印度各地都有花生的收成;一个来自线上和线下的裁剪模型;B从在线模型中去掉了作物蒙版和离线作物模型。观察数据来自印度的国家产量统计数据

在线模拟与观测数据相似,但1988年的高观测产量未被捕获。在线模型通过从全印度加权平均产量的计算中删除那些被作物面具排除的网格单元(但实际上有一些花生生长)来生成进一步的后求。这一变化使得在线模型模拟的平均响应更接近离线模拟和观测值,并再现了1988年的高产(图3.6b)。
继续阅读:制度倾向与演变
这篇文章有用吗?