浮动在海洋大气模型
浮动的海洋大气模型(漫游)跑到使用生成高分辨率海洋和大气预测在有限的领域感兴趣的澳大利亚国防部队(ADF)。漫游被设计成由非专业用户设置,以最小的输入,在澳大利亚地区(Herzfeld 2009),和常用的预测。漫游海洋模型初始化并迫使由OceanMAPS数据,通常实现1 - 2公里的决议。图24.8显示了海表面温度(SST)和电流计算域霍巴特附近的漫游,塔斯马尼亚岛(见图24.1),这是用于水雷战跑锻炼的儒艮。练习“儒艮”涉及到我的猎人沿海(MHC)血管休恩和DIAMANTINA提供扫雷和狩猎能力,辅助扫雷艇袋狸,间隙和美国海军打捞潜水员潜水团队。它发生在2009年10月的两个星期在文特河,霍巴特和方法。
在这个例子中,当前最重要的特点是运动,涉及一个水下调查的历史MV文特河Illawarra湖的残骸。水温也感兴趣的潜水团队,以确保他们准备适当的条件。漫游是用于生成当前预测每隔一个小时。此外,在提供高分辨率的大气模型预测风的强度和方向,也在一个小时步伐,使得海况的变化预期。这些也被证明在运动产生重大影响。注意,图24.8不显示完整的解决漫游模式,因为它已经扩展到显示在风暴湾的条件。
图形化的产品,以及提供海洋数据的输出海洋预报系统可用于声纳范围预测系统,为了生产评估和预测的声学条件考虑海洋环境的时空变化。图24.9显示了一系列的声纳范围预测,已生成的跑的战术环境支持系统(苔丝2)使用漫游数据分辨率1公里。杰维斯湾附近的领域,这是悉尼以南约130公里(图24.1)。这是一个地方跑经常进行反潜战,MW练习。声纳范围预测显示为检测概率的情节(PODgrams), 90%或者更大的概率检测红色所示。
-
 and current forecast produced by the ROAM system for the mine warfare Exercise DUGONG in October 2009")
- 图24.8海表面温度(SST)和当前预测产生的漫游系统的水雷战运动2009年10月儒艮
 and current forecast produced by the ROAM system for the mine warfare Exercise DUGONG in October 2009")
图24.9显示了在海洋表面温度和电流为背景。反潜战的三个PODgrams护卫舰离开杰维斯湾东北部和跟踪,搜索潜艇在潜望镜深度(PD)。类似的计算可能运行在任何深度所需的用户。声纳的功能用于计算都是虚构的。PODgrams似乎有意义的直觉,因为它们显示范围最大的近海,那里的水是浅,相对同质的温盐结构,和底部的损失从沙质海床很低。离岸,温度梯度大,检测范围更少。图24.9的规模可以被考虑到当前的测量向量1公里的漫游决议所示。PODgrams有空心的中心,因为不能收到回声而声纳发射。这给上升到
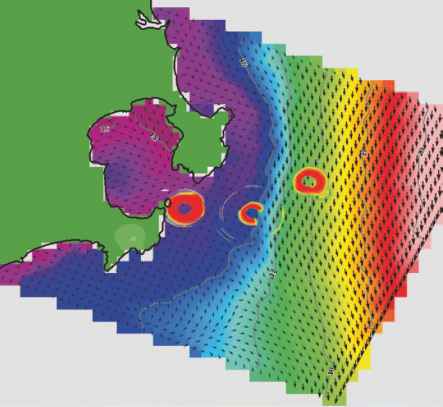
图24.9声纳性能预测产生的漫游和苔丝2 2009年10月06日1000 UTC,杰维斯湾附近的新南威尔士州。.stretch背景显示海洋表面温度(颜色和轮廓)和电流向量。三个检测概率的情节(POD-grams) over-plotted,检测概率为90%或更多的红色所示
图24.9声纳性能预测产生的漫游和苔丝2 2009年10月06日1000 UTC,杰维斯湾附近的新南威尔士州。.stretch背景显示海洋表面温度(颜色和轮廓)和电流向量。三个检测概率的情节(POD-grams) over-plotted,检测概率为90%或更多的红色所示不同半径的“死区”,根据发射脉冲的持续时间,和声音在水中的速度。
继续阅读:形式的海洋能源
这篇文章有用吗?