当前的就地仪表和其局限性
现场测量
机载平台用于现场测量必须合适。例如,在某些应用程序中一个系留气球,可能是足够的和经济,而在其他远程飞机是至关重要的。活动只需要几个工具,一架轻型飞机和无人航空器(UAV)可能是最好的选择;在其他项目中,大容量飞机必须携带所有的技术设备以及所涉及的许多运营商和科学家。一些应用程序需要一架飞机能飞高,还是低海拔地区。
有大量的现场仪器用于测量气溶胶的特性,特别是云凝结核(CCN),尚无结冰核
(在),和云属性如云滴,冰粒子,云含水量,precipitation-sized粒子,和特殊属性相关的灭绝和散射粒子的自己。经常需要测量气相化学成分和化学粒子属性来模拟云的互动与他们的正常环境。是不可能解决所有可用的仪器在本章中,我们也不能成功地预测仪器的新进展。因此,读者将会提到一些一般性的文件,和大纲的一些可用的工具将提供。
在1970年代,粒子测量系统(PMS),具体地说,鲍勃·诺伦伯格影响云原位测量的一个新时代。诺伦伯格(1981)描述了其中的一些新的探测器;最近总结原位测量技术,看到包姆加德纳et al。(2002)。图4.1(参见下一节)表明一些标准PMS探针的大小范围大小分布测量。劳森(1998、2001、2006)描述新仪器可以帮助形象和歧视小冰粒子在大气中,这是一个非常困难的问题目前(见下文)。科洛夫et al。(1998 b)引入一个新的探针,可以同时测量云液态水含量(LWC)和云总含水量(TWC)。罗杰斯et al。(2001)和玫瑰et al。(2007)讨论的一些问题和CCN的测量。
表4.1显示了一些云微物理参数测量液体,所有的冰,和混合相位云,连同其名义样本数量和可能的准确性。许多问题存在于建立这样一个sim-plifi ed概述;然而,非专家的目的是提供有用的信息。哈雷特(2003)讨论了一些错误带来的抽样统计,在表4.1中尚未得到充分考虑。一些原位测量参数,重要但不上市,包括在-云的温度和相对湿度(或过度饱和),以及上升气流湍流速度。Out-of-cloud露点也是一个重要的变量。温度在云是一个有趣的案例,因为通常认为,它可以测量在1°C,提供调查不会变得湿(詹森和拉格1993)。使用探针进行快速响应,然而,哈曼et al .(2001)演示了快速波动1 - 2°C /一两厘米的距离,从而显著影响云superaturation。不幸的是,测量方法在云过度饱和是有限的,一个异常被Gerber(1991)描述的技术。科洛夫和艾萨克(2006)显示测量的过度饱和液体内,所有的冰,和混合相位云,液体和混合相位云接近水饱和度。有几种技术来测量在云动荡;测量等的总结了积云,看到麦克弗森和艾萨克(1977),Siebert et al。(2006)。
现场收集的数据必须与工具执行所需的任务。艾萨克et al。(2005)描述仪器获得的必要条件
表4.1原位测量通常在液体,所有的冰,混合相位的云。名义上的样本体积率是在100 s - 1所示;源标称精度的脚注中注明。个人数据集应该提供自己的数字。假设探测精度正确安装在飞机和校准。CCN,测量不一定是做云。SS:过度饱和;N:数量浓度;D:颗粒直径;MVD:体积平均直径。
表4.1原位测量通常在液体,所有的冰,混合相位的云。名义上的样本体积率是在100 s - 1所示;源标称精度的脚注中注明。个人数据集应该提供自己的数字。假设探测精度正确安装在飞机和校准。CCN,测量不一定是做云。SS:过度饱和;N:数量浓度;D:粒径;MVD:体积平均直径。
参数 |
尺寸范围 |
名义上的样本(在100 ms vol.”1) |
可能的准确性 |
评论 |
所有的都是液体,云 |
||||
CCN 1 - 2 ' 3 |
0.1 - -1.3%党卫军 |
1 mur1 |
10 ^ 10% |
没有任何已知的校准标准 |
LWC 4 ' 5 ' 6 |
0.01 - 3 gm-3 |
41岁的s - 1 |
15% |
错误为低LWC更高;只有准确的MVD < 40 | im。 |
云droplets7的8 |
2-50吉姆 |
30立方厘米s_1 |
护士:20%,D: 1 - 2吉姆 |
精度取决于空速、大小和浓度 |
大型droplets9 10 'u |
50 - 500吉姆 |
5 - 15 1 s - 1 |
护士:25%,D: 10% |
精度依赖于速度和大小;50 - 100 |我衡量了所有阶段 |
降水drops7 |
> 500年吉姆 |
200年1 s - 1 |
护士:10%,D: 10% |
|
所有- - -冰云 |
||||
IN12 |
0到-40°C,冰党卫军水饱和度20% |
1最低为1 |
未知的 |
非常困难的测量 |
冰水content13 |
0.01 - 2通用“3 |
41岁的s - 1 |
25% |
争论由成像测量 |
小冰particles14 |
2 - 100吉姆 |
和散射探针与粉碎了调查技巧。 |
参数尺寸范围名义样本(vol. p„党卫军¡h c |。精度评价
& 100 mr1) J
大型ice9“10”11 |
> 100 (im |
50 - 200 1 s - 1 |
护士:25%,D: -15% |
|
粒子shape11”15 |
需要5 - 10像素 |
自动识别软件可以但不是标准化的 |
||
混合相位的云 |
||||
TWC13 |
0.01 3 g m”3 |
41岁的s - 1 |
50% |
精度取决于冰/液体部分。 |
LWC4 ' 5 ' 6 |
0.01 3 g m”3 |
41岁的s - 1 |
30% |
|
冰水content13 |
0.01 - 2 g m”3 |
41岁的s - 1 |
50% |
|
小尺寸distribution16 |
2 - 100 | im |
未知的 |
没有验证技术相隔离 |
|
大型sizes9‘10’n > 16 |
> 100 (im |
5 - 200 1 s - 1 |
护士:25%,D: 15% |
需要良好的液体/冰歧视软件 |
粒子shape11”15 |
需要5 - 10像素 |
可以通过假设所有圆形二维图像代表液体滴 |
||
来源: •兰斯et al。(2006) 2柔丝et al。(2008) 3罗伯茨et al。(2006) 4骗子et al。(1987) |
5科洛夫et al。(1998) 6 strapp et al。(2003) 7诺伦伯格(1981)8包姆加德纳&科洛夫(1997) |
“Strapp et al。(2001) 10 gayet et al。(1993)“科洛夫et al . (1998 b) 12罗杰斯et al。(2001) |
13科洛夫et al .(2008) 14赫穆斯菲尔德(2007)15科洛夫et al。(2000) 16可贝尔et al。(2001 b) |
|
飞机结冰的数据认证测试,多在纸是相关的信息。选择和评估数据集时,需要知道所需的参数(a), (b)所需的精度测量,(c)的条件下,测量范围必须(例如,温度、高度规模、LWC滴大小、长度),和(d)云的类型检查(对流,层状)。一般来说,数据必须足够大来获取具有代表性。一般来说,一些案例研究不够好”来形容云对气候模型或评估raybet雷竞技最新遥感技术,尽管他们可能非常有用的用于检查物理过程。
应该强调,很难衡量,因为他们可以通过许多不同的激活机制(如沉积、接触、浸、凝结冻结;cf。Kreidenweis et al .,这卷)。这些难题非常复杂,因为它必须获得垂直的,因此需要机载仪表。测量的不确定性小冰晶也相当大。相结合,这两个问题代表一个大的不确定性描述冰云和大气中理解成冰作用机制,这是一个混合的初级成核和二级流程通过冰乘法。这方面肯定需要进一步开发工具。
通常认为,通过测量粒径谱,液体,冰,或TWC可以由一个简单的集成的光谱。然而,重要的分级错误存在任何测量,当探针的直径大小内本是立方来计算体积或质量,由此产生的误差综合液体或冰含水量过大(包姆加德纳1983)。因此,建议一个探测器专门为直接测量液体,冰,或者TWC,如热线探针或逆流虚拟撞击器,被选中。结冰率指标也是非常有用的,以确定是否数据收集期间遇到过冷液体。如果斜坡电压测量中测试,然后粗略估计LWC可以提供一个检查与其他仪器(Mazin et al . 2001;可贝尔et al . 2001年)。
成像探测器测量粒子的形状是非常有用的,在某些情况下,必要的。许多云包含冰和液体颗粒(混合相位云)。可贝尔et al . (2001 b)和科洛夫et al。(2003)已经证明,这种云层频繁发生和讨论一些相关的测量问题。总结过冷在云测量,艾萨克et al。(2001)报告说,25%的海上和49%的大陆被认为是混合云的阶段。如果不可能评估冰晶是否存在,这些粒子可以被误解为过冷大下降,从而极大地偏置液体云体积平均直径估计。热线LWC探测器同时测量冰粒子的一小部分,因此高估了LWC如果冰质量浓度高。
有必要选择工具,评估并在公开文献报道。制造商不断产生更好的工具,但他们通常不提供的规范运作。用户应该寻找比较的测试仪器在结冰风洞(例如,Strapp et al . 2003年)。这些测试可以给探测的有效性及其相关的评估精度和限制在一个广泛的环境条件。所有仪表有弱点和优点。重要的是要知道这些都是在选择传感器或采样为特定的应用程序。仪器及其产生的数据应该选择使用只有在他们的精度已经记录和证明。
其他问题必须考虑:
1。的调查充分脱冰的温度和液体水范围预期?是常见的新设计的调查没有足够的除冰加热器。
2。将成像探测器和液滴光谱仪雾在快速下降?成雾也可以发生在爬温度反演。蒙上水汽和糖衣签名(如Brenguier et al . 1993年)必须是已知数据分析过程中,需要应用和修正。
3所示。一些调查工作在低飞机速度(例如,典型的涡轮螺旋桨的速度),但正确操作电子不够快的高速(典型的喷气式飞机的速度)。
遥感仪器
推出叫做(Stephens et al . 2002年)和卡利普索(睫毛et al . 2007年)在2006年标志着一个新时代的开始在云与气溶胶星载遥感连续雷达和激光雷达观测的开始。同时,新的偏振光谱图象处理技术已经在轨道上或下的制备提供一种改进的水平洞察云、气溶胶,及其对天气和气候的影响。raybet雷竞技最新
地面遥感观察往往低估了全球地球系统遥感中的作用,然而他们擅长时间采样分辨率,准确性和连续性,并提供数据,不能从卫星获得的表面(例如,云和气溶胶辐射强迫)。地面观测的主要缺点是他们有限的空间范围。因此,建立网络在过去的十年是一个重要的成就(支持”等,本卷)。
飞机观测观察云的不可或缺的工具。大多数卫星应用测试飞机在太空部署之前,和现场测量进行定期验证卫星测量和算法;密集的、垂直解决飞机观测链接全球广泛的地面和太空观测。无人机大气研究正成为一个越来越重要的工具。
最大气遥感是基于测量的电磁辐射与大气成分保留信息交互通过散射、吸收和发射。一个异常声雷达(声波探测和测距),它使用反射声波的大气边界和是一个重要的工具来监控风速和大气稳定。
用于大气遥感的波长位于三个光谱区域(“窗口”),具有低透明度的各种大气的气体在地球的大气层。这是如图4.1所示,在晴空大气透明度的波长和频率的函数。还绘制规范化太阳能和地面发射的普朗克曲线。第一个范围是称为“短波”或“太阳能”窗口。它位于太阳辐照度的最大(490 nm波长),来自太阳的光球层温度的黑体发射约5800 K。它包括近紫外、可见和近红外波段是有界的,平流层臭氧吸收和散射的分子短的波长结束。第二个范围(“长波”、“热红外”或“陆地”窗口)的波长集中在10点(对应于地球的黑体辐射的峰值
频率lOPHz IPHz lOOTHz lOTHz ITHz lOOGHz lOGHz 1 ghz lOOMHz lOMHz 1 mhz
Solar_
发射
Solar_
发射
_Terrestrial发射
_Terrestrial发射
lOnm lOOnm下午1点1 opm oopm 1毫米lOmm lOOmm 1米1 om织机1公里
波长microwaves_radio waves_
微波炉。辐射计
¡]d¡rVIS /近红外/红外成像系统/蜂鸣器:!W Ka 'XC S雷达remotesensinS
气溶胶粒子云滴细雨雨
2直流
10 nm o0nm 1点10点100点1毫米10毫米100毫米1 m 10 m 100 1公里
直径
图4.1:大气透明度与归一化太阳能和地面发射。底部:光谱遥感技术的范围和大小范围对于一些现场仪器。
2基于非
表面温度290 K)。太阳能和陆地之间的过渡范围通常是定义在大约4 ^ m。陆地范围延伸到100 ^,包括各种二氧化碳和水蒸气的吸收特性。第三个范围(“广播窗口”,1厘米到30米波长)用于微波辐射计和雷达。遥感技术及其典型波长范围图4.1所示。
如果测量辐射来源于自然源(太阳或地球发射),这项技术被动遥感;主动遥感指的是这些方法的辐射来源于仪器本身。被动遥感的一些例子包括可见光和红外图像以及微波辐射计。活跃的技术包括雷达、激光雷达、云高计。遥感可以进一步区分通过查看几何(最低点或肢体)和通过查看模式(profiler、成像系统和扫描仪)。成像系统覆盖大部分地区有时高横向分辨率,但他们只包含有限的信息大气的垂直结构。此外,对薄卷云、气溶胶普遍低,尤其是在明亮的表面。分析器查看大气倾斜路径,因此有很高的垂直,但水平非常有限,决议。他们非常敏感的卷云、气溶胶和气体,因为(a)的大型光子通过大气和路径长度(b)表面贡献较低信号。然而,大型倾斜路径导致强烈的衰减,因此信号饱和物以相对较低的垂直光学厚度。一些技术结合最低点和肢体查看使用多个探测器或沿航迹扫描模式。星载活跃仪器使用垂直俯视几何。地面仪器可以天顶浏览(例如,激光雷达,天空成像系统),扫描(如雷达),或跟踪(太阳光度计的)。
幽灵似地解决测量使垂直的检索大气结构即使对于垂直俯视几何图形(播出,夏英et al . 2006;密苏里州AMSU 1996),并允许云的分离,气溶胶,水蒸气和其他气体的通过光谱特征。另一方面,确定能源预算云和气溶胶的空间,宽带反照率和发射测量所需的太阳能和地面光谱范围,分别。
辐射的偏振状态可以利用被动和主动遥感。是有用的检测颗粒形状和方向以及独立的贡献top-of-atmosphere从大气和地表辐射(Herman et al . 1997年)。
表4.2列出了云和气溶胶参数与遥感可访问。的准确性和灵敏度技术特定参数取决于底层物理。例如,雷达降水有灵敏度高,可以确定其几何分布。这是因为雷达反射率,由瑞利发出的反向散射信号,正比于第六下粒度分布的时刻,(D6),因此权重由大滴。相比之下,微波辐射计
等我o e |
云顶高度/基地•激光雷达/测云仪,近红外光谱、音响的高度 |
羽/气溶胶高度•激光雷达 |
云层•VIS /红外成像系统 |
||
o |
•雷达垂直结构,厚度 |
•激光雷达垂直结构,厚度 |
光学厚度•VIS形象 |
•太阳光度计的光学厚度、埃参数,激光雷达成像系统 |
|
光学 |
有效半径•VIS /近红外光谱图像 |
单散射反照率•扫描太阳光度计 |
云的反照率辐射强迫•光谱/宽带成像系统 |
气溶胶直接影响辐射强迫•光谱/宽带成像系统 |
|
冰/•微波辐射计液态水路径/成像仪 |
大小分布•太阳光度计,偏振测定 |
|
如果£ |
晶体形状•偏振测定 |
气溶胶类型(灰尘,海盐,…)•太阳光度计,偏振测定 |
H |
降水率;下降速度•微波辐射计、多普勒雷达 |
|
热力学相•VIS /近红外光谱图像 |
混合状态(内部/外部)•目前遥感技术 |
提供了一种直接测量的云亮度温度和emis-sivity,可以与第三下粒度分布的时刻,(D3),从而column-integrated含水量(液态水路径,LWP)和降水率。然而,小的空间结构信息可以被检索。可见光或红外图像是由云顶附近的属性权重。这是首选的方法确定云辐射强迫因为光学厚度,r,相关(D2),以及云量和云顶有效半径,再保险公司可以直接检索。通过简单的关系,LWP = 2/3公关x (p表示水的密度),LWP可以推断,假设有效半径在云上代表整个云,这是经常不是这样的,因为云的垂直结构。相反,云column-averaged有效半径可以获得当光学厚度检索结合微波辐射计LWP检索。
云滴浓度是不容易通过遥感;即使许多时刻如(D3)和(D2)是已知的,假设滴大小分布的形状需要获得积分,数量浓度。各种算法存在检索云热力学相(Chylek et al . 2006),但这是特别困难的,当液体和冰阶段发生。其他参数没有限制从遥感包括云和气溶胶吸收和加热率。这个困难是基础:星载传感器测量通量的氛围;地面同行获得它在表面;,都需要同时确定大气吸收。
星载气溶胶检索图像遭受的问题他们辐射签名不提供足够的对比区别表面反射率的变化。此外,目前还没有方法获取气溶胶光学厚度的云,因为云主宰反射的辐射信号。气溶胶单散射反照率的检索更加难以获得,或者是可能只有在特殊情况下(例如,从太阳闪烁水;考夫曼et al . 2002年)。地面太阳光度计的气溶胶光学厚度的最可靠的来源,但不工作如果云层遮挡阳光。空间——有潜力的技术和机载检索是偏振测定。星载和地面激光雷达提供信息的分层气溶胶和细云从他们的反散射信号;一些系统直接测量灭绝profi莱斯,因此光学厚度(column-integrated灭绝)。从线性去极化率,颗粒形状信息和热力学阶段可以推导出:而不改变极化的球形颗粒入射辐射,nonspherical粒子(冰晶和一些气溶胶类型)修改的极化状态。一些关于气溶胶粒度信息可以从埃检索参数,这是一个测量的波长依赖气溶胶光学厚度。它也可以被用来区分各种气溶胶和云的光学厚度非波长依赖型)在未来的高光谱卫星观测。
现场仪表:问题和局限性问题和绕流和内部调查
一个常见的错误进行动态观察时是选择探头的安装位置不佳的。所有安装位置应该有一个工程评估的适用性。这个评估将优先被执行模型或风洞模拟。探针应该在自由流、边界层外的飞机,而不是受发动机,螺旋桨洗或其他调查。一般选择贫穷探头安装位置窗口坐骑,机身的顶部附近的驾驶舱,和翼尖。好安装位置可以找到在机翼下面,有时飞机的腹部。王(1984)显示100点下降可以影响他们流的机身(图4.2)。在这种情况下,接近皮肤,机身的顶部变成了阴影区这种规模的下降。进一步从皮肤有一个粒子轨迹的浓度。
图4.3显示了越来越多的机身顶部的错误位置测试期间,580年加拿大康维尔Nevzorov探针(艾萨克et al . 2006年)。作为
图4.2气流(左到右)显示流线的机身的顶部(顶部)和轨迹的旅行100 ^滴F27机身的旅行在90年代1(底部)所描述的国王(1984)。
图4.2气流(左到右)显示流线的机身的顶部(顶部)和轨迹的旅行100 ^滴F27机身的旅行在90年代1(底部)所描述的国王(1984)。
可以看到,有一个阴影区域和区域的浓度也划定滴指定的直径。康维尔阴影区域的最大值发生在液滴直径160 ^。使用更复杂的模型,Twohy和罗杰斯(1993)表明,更大的粒子,以更大的惯性,将十字架流线和阴影。应该注意的是,冰晶的行为是明显不同于球形水滴。王(1985、1986)更详细地讨论这个。安装位置错误往往是最高的中间尺寸粒子(100 - 500 ^)。
40 60 80 100 120液滴直径(| jm)
140 160
图4.3浓度增强计算基于国王(1984)液滴轨迹和airfl噢模型绘制的函数距离加拿大康维尔580架飞机的机身表面与液滴直径(艾萨克et al . 2006年)。空速是假定为100年代”。粒子大于120 m ^将在阴影区(阴影区域)。康维尔阴影区域的最大值发生在液滴直径160 ^。使用更复杂的模型,Twohy和罗杰斯(1993)表明,更大的粒子,以更大的惯性,将十字架流线和阴影。
探测器本身可以创建流场问题(例如,Norment 1988)。例如,云粒子成像仪(劳森et al . 1998年)有很长的流管在抽样之前粒子可能被打扰或分解。科洛夫以撒(2005)描述了光学成像探测可能导致粒子的破碎的调查水湾(见图4.4)。适当的软件可以消除很多的问题,但用户应该意识到有必要做出这样修正(如字段et al . 2006年)。
定义现场调查样本册
对于一些探头,有必要准确计算样本册。这可能是非常困难的或相对简单。PMS养老金探头,一个必须认识到,样品体积可以依靠粒子大小和空速以显著的方式(包姆加德纳和科洛夫1997)。科洛夫et al。(1998)描述了如何为修正粒子大小。探针(例如,PMS FSSP)不能总是数足够快的粒子到达时太快。电子产生一个死时间,需要考虑在计算样本体积(Brenguier et al . 1994年)。
原位探针尺寸范围
在完成是非常重要的测量粒子尺寸范围。这是一个可以被忽略的问题。有时,例如,PMS养老金2-DC探针被用来确定雷达反射率。然而,它
ffi E
图4.4的孤立的每帧图像数量PMS 2-DP探针和规范xrii探针(从科洛夫和艾萨克,2005)。D计算的价值大小,97%的破碎事件指定数量的孤立的每帧图像位于D > D____。
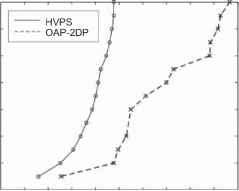
图4.4的孤立的每帧图像数量PMS 2-DP探针和规范xrii探针(从科洛夫和艾萨克,2005)。D计算的价值大小,97%的破碎事件指定数量的孤立的每帧图像位于D > D____。
众所周知,几大颗粒会影响反射率,因为它取决于数量浓度乘以直径的6次方。图4.5显示了复合光谱领域项目的开展在安大略省南部,加拿大(艾萨克et al . 2002年)。顶部、中部和底部图形显示数量浓度、质量浓度、和反射率的浓度,分别作为TWC的函数。面板左侧显示液态水光谱;那些在右边显示冰水光谱。的基本
大陆CFDE微光和播出
与TWC液相光谱的变化
大陆CFDE微光和播出
与TWC液相光谱的变化

点= 462 |
. .0.005 < = |
TWC < 0.050 |
462年 |
- 0.050 < = |
TWC < 0.100 |
370年 |
0.100 < = |
TWC < 0.150 |
318年 |
0.150 < = |
TWC < 0.200 |
222年 |
- 0.200 < = |
TWC < 0.250 |
179年 |
- 0.250 < = |
TWC < 0.300 |
103年 |
0.300 < = |
TWC < 0.350 |
155年 |
- - - - - - - 0.350 < = |
TWC < 0.900 |
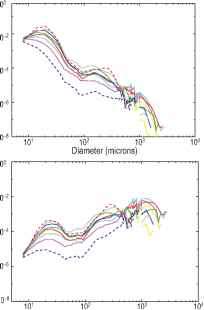
图4.5的平均光谱CFDE三世和播出排序由液体和冻结成冰的30年代的价值观。30年代的“数量”每个TWC光谱用于显示。
图4.5的平均光谱CFDE三世和播出排序由液体和冻结成冰的30年代的价值观。30年代的“数量”每个TWC光谱用于显示。
探测器使用和他们的公称尺寸范围PMS FSSP标准范围(3-45点),PMS FSSP扩展范围(5 - 95点),PMS 2-DC(25 - 800点),和PMS 2-DP下午(200 - 6400)。2-DC探针,只计算粒子超过100点,因为不确定性的计算和分级颗粒从25 - 100点这个调查。这将创建一个大小差距FSSP 2-DC探针,可见在很多情节左边的面板。分析技术,包括相位鉴别方法,详细描述了可贝尔et al . (2001 b)。
大陆CFDE微光和播出
冰雪覆盖的相位谱TWC的变化
点= 317 |
- - - - - - - 0.005 < = |
TWC < 0.050 |
492年 |
-0.050 < = |
TWC < 0.100 |
288年 |
-0.100 < = |
TWC < 0.150 |
129年 |
-0.150 < = |
TWC < 0.200 |
52 |
-0.200 < = |
TWC < 0.250 |
47 |
-0.250 < = |
TWC < 0.900 |
-
")
- 102 103直径(微米)
")
图4.5(继续)
图4.5显示反射率值继续增加作为一个越来越大的尺寸。碾轧的最大大小可能是一个功能的软件,和冰粒子光谱,这可能是一个迹象表明,最大尺寸没有测量。应该强调,软件技术允许一个测量以外的最大大小范围的调查,800点和600点的PMS 2-DC 2-DP探针,分别(见下文)。然而,要做到这一点,一个人必须承担球形或对称粒子。显然,这些假设可以在冰颗粒的情况下是错误的。
现场调查分析软件
云微物理数据的分析通常需要复杂的软件。执行自动分析使用软件是很困难的。Kingsmill et al。(2004)描述的一些问题。艾萨克et al。(2005)提供的一个例子不同的假设在软件可能导致不同的结果,如下所述。
冰雨情况数据收集从加拿大寒冷的细雨实验三世,表4.3说明了可能遇到的困难通过对经前综合症的分析二维图像(诺伦伯格1981)。分析使用可贝尔et al . (2001 b)方法和第二个软件包开发通过加拿大环境称为“二维分析仪”,它使用的技术被赫穆斯菲尔德和帕里什(1978)。粒径决定从2 d图像通过测量维度在X方向上(飞行方向)或Y维度。直径也可以从总粒子面积计算假设粒子是一个球体。扩展区(穰)确定使用几何重建,赫穆斯菲尔德和帕里什(1978)后,基本上看着下降部分的成像,估计整个粒子的直径。中心(CIN)粒子成像技术一定的中心。双头元素(迪)技术限制粒子的分析是完全成像,不影子二极管阵列的元素。
分析技术 |
圆形颗粒 |
不规则的粒子 |
LWC g m 3 LWC g m 3下午(125 - 6400)(125 - 2000点) |
||
迪 |
Y |
Y |
0.262 |
0.192 |
二维分析 |
CIN |
Y |
Y |
0.28 |
0.213 |
二维分析 |
0.190 |
0.190 |
||||
CIN |
Y |
X |
(0.205 |
(0.205 |
可贝尔 |
FSSP) |
FSSP) |
||||
穰 |
H&P |
H&P |
0.296 |
0.184 |
二维分析 |
穰和CIN技术,粒子几何必须假定来确定调查样本体积准确。这些技术适合循环下降但不申请形状不规则的冰晶。表4.3中描述的情况下包含滴直径125 - 2000点之间,和冰晶体直径高达5000点。大多数的水文气象观测是圆的形状(即。下降,下降),体积平均直径在800 - 1000点之间。一小部分质量的小液滴尺寸范围将由PMS FSSP测量探头(< 100点)。二维分析器软件提供类似LWC穰之间的值,CIN,和迪技术,应该大部分粒子图像时,圆形的形状。然而,对于范围125 - 6400点,有重大分歧的LWC可贝尔软件。这个结果从二维分析器是解释冰晶的大小从2000 - 6000点和计算相关LWC下降。可贝尔软件更准确地将圈(滴)方面(冰晶),因此避免了这个问题。 When the two software programs are compared over the range 125-2000 pm, the LWC values agree within 10%. This demonstrates that the application of advanced software analysis techniques to determine LWC can be quite erroneous if used blindly. It also provides an example of why 1-D measurements of hydrometeors should not be used to compute LWC, since 1-D instruments cannot separate drops from ice crystals in a mixed-phase environment.
这一分析表明,可获得实质性的差异在使用不同的分析技术。它强调指出,软件应充分理解和小心使用。
原位探针校准
在可能的情况下,校准的探测器应该做运动之前和之后。许多探测器可以校准风洞时访问。Strapp和Schemenauer(1982)提供了一个很好的实例的问题不知道他们的用户可以与隧道检测校准。他们检查14 Johnson-Williams (J-W)云LWC以23传感器探测头从十研究机构在加拿大国家研究委员会的糖衣隧道,发现:
. . .six 14系统至少有一个传感器头与非功能性壳或支柱加热器到达,可能不了解它的主人。这个缺陷会导致错误的数据在低于冰点和零上温度这些测试期间观察到的。三个系统显示一个大的区别在测量变化的传感器。三个至少有一个探针与强大的空速依赖。基于这些问题,仅九14系统可以提供测量如果最不幸的一组传感器头不当使用(Strapp Schemenauer 1982, p . 106)。
最近的测试使用NASA结冰研究隧道由Strapp et al。(2003)。图4.6显示了国王LWC探针与隧道参考LWC和这个探针的响应如何卷了液滴的粒度中值变大。超出平均体积直径40点,误差增长超过20%的低估。Strapp et al。(2003)也显示光学阵列探测器可以测量不同浓度的大滴在隧道内环境(图4.7)。
风洞是昂贵的操作和仪器校准并不总是可用的。这是更容易和更便宜的仪器和数据运行模拟器。例如,这可能意味着将玻璃珠或十字线已知大小的样本区域的光学探针,最好是在飞行速度接近那些经验。染料和包姆加德纳(1984)描述的校准PMS FSSP使用玻璃珠。探测器应校准
LWC清洁工12.9 - -17.6点
继续阅读:Remotesensing测量和限制可见光和红外图像
这篇文章有用吗?